第2C部分:使用VPU加速
与第2B部分一样,第2C部分使用定点算术实现了FIR滤波器。
在第2B部分中,我们调用了int32_dot()来计算内积。虽然int32_dot()比我们在C中编写的编译器生成的内积要快得多,但int32_dot()仍然只使用了xcore设备的标量算术单元。
第2C部分将int32_dot()替换为对vect_s32_dot()的调用,这是来自lib_xcore_math的库函数之一,它使用VPU来进行计算。
我们将看到使用VPU可以显著提高速度。
来自lib_xcore_math
本阶段使用了lib_xcore_math中的以下操作:
实现
在本部分中,filter_task()、rx_frame()和tx_frame()与第2A部分和第2B部分中的相同。
// 将滤波器应用于产生单个输出样本
q1_31 filter_sample(
const q1_31 sample_history[TAP_COUNT])
{
// 与滤波器系数关联的指数
const exponent_t coef_exp = -28;
// 与输入信号关联的指数
const exponent_t input_exp = -31;
// 与输出信号关联的指数
const exponent_t output_exp = input_exp;
// 与累加器关联的指数
const exponent_t acc_exp = input_exp + coef_exp + 30;
// 为了实现正确的输出指数,对滤波器的累加器应用算术右移位
const right_shift_t acc_shr = output_exp - acc_exp;
// 使用lib_xcore_math中的优化函数计算样本历史和滤波器系数之间的64位内积
int64_t acc = vect_s32_dot(&sample_history[0],
&filter_coef[0],
TAP_COUNT,
0,
0);
// 应用右移位操作,将位深度降至32位
return ashr64(acc,
acc_shr);
}
vect_s32_dot()与int32_dot()有一个重要的区别,我们需要考虑到这一点。
C_API
int64_t vect_s32_dot(
const int32_t b[],
const int32_t c[],
const unsigned length,
const right_shift_t b_shr,
const right_shift_t c_shr);
int32_dot()的输出是两个int32_t向量的直接内积,而vect_s32_dot()在硬件上有一些额外的操作,一些是由硬件强制要求的,一些是为了块浮点运算而需要的。
在lib_xcore_math文档中,操作的_输出_通常用变量表示,而和通常用于操作的输入。上面的应该被视为返回值。一些库函数(例如vect_s32_mul())输出向量,因此必须通过参数输出,而不是返回。在这些情况下,仍然被认为是输出。
XS3 VPU始终对32位乘积的结果应用30位右移,引入了因子。b_shr和c_shr参数是有符号的算术右移,应用于b[]和c[]的各个元素之前进行乘法。
为了理解为什么需要这样做,考虑以下假设情况:
int32_t b[] = {20};
int32_t c[] = {15};
right_shift_t b_shr = 0;
right_shift_t c_shr = 0;
int64_t a = vect_s32_dot(b, c, 1, b_shr, c_shr);
a将是多少?
如果我们期望a得到300,那结果就不太好了。现在考虑:
int32_t b[] = {20};
int32_t c[] = {15};
right_shift_t b_shr = -14;
right_shift_t c_shr = -16;
int64_t a = vect_s32_dot(b, c, 1, b_shr, c_shr);
现在a将是多少?
这次我们使用b_shr和c_shr来抵消30位右移。b_shr和c_shr选择的特定值并不重要。要求是b_shr + c_shr == -30,并且当b_shr或c_shr为负时,不超过b[]或c[]的头空间。
回到我们的滤波器,让我们考虑如何修正我们的算术以适应30位右移。
在第2A部分中,我们发现当我们计算输入样本和滤波器系数的直接乘积时,累加器的指数只是输入指数和系数指数的总和。但现在,我们不再计算累加器为
我们必须将其计算为(在我们对vect_s32_dot()的调用中,b_shr = c_shr = 0)
其中是第2C部分的新累加器变量。
让我们弄清楚我们必须做什么才能获得正确的结果。从我们(简化后的)滤波器方程开始(参见第2A部分):
这告诉我们我们的累加器指数acc_exp 。 了解了这一点,我们可以像在第2A部分一样计算输出右移量——我们_想要_的输出指数减去我们_已有_的指数:
const exponent_t acc_exp = input_exp + coef_exp + 30;
const right_shift_t acc_shr = output_exp - acc_exp;
有关vect_s32_dot()的完整详细信息,请参阅lib_xcore_math的文档。
结果(Results)
vect_s32_dot() 函数的内部循环实现有11条指令。而 int32_dot() 函数的内部循环只有4条指令,那么为什么 vect_s32_dot() 的速度要快得多呢?
XS3 VPU 的向量寄存器每个都有8个字长。vect_s32_dot() 使用的 VLMACCR 指令从内存中加载一个向量(8个元素),并同时执行8个乘法(和加法)操作。
因此,虽然在 int32_dot() 中,我们对循环的每次迭代执行一次乘法和加法,但在 vect_s32_dot() 中,我们执行了8次。因此,从简单的角度来看,我们应该期望加速比约为
实际上,由于其他开销的存在,我们在这里看到的加速比约为 (计算输出样本)。
时间统计
| 时间类型 | 测量时间 |
|---|---|
| 每个滤波器系数 | 13.94 ns |
| 每个输出样本 | 14274.91 ns |
| 每帧 | 3720900.00 ns |
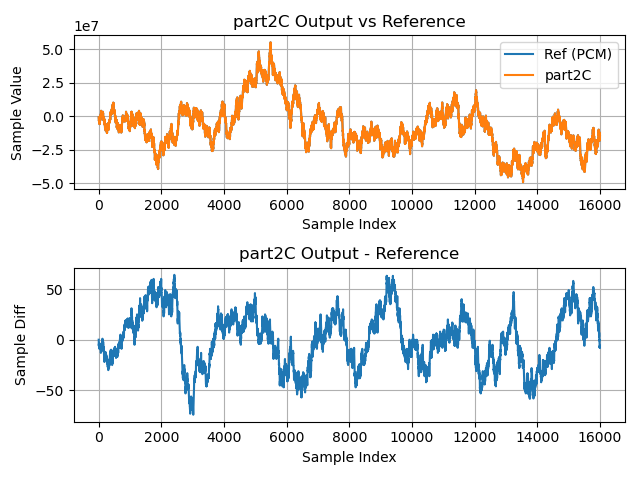
输出波形图