第3B部分:使用向量API实现BFP FIR滤波器
与第3A部分一样,第3B部分使用块浮点算术实现了FIR滤波器。
在第3A部分中,我们使用纯C实现了块浮点FIR滤波器。我们需要自己管理指数和头��空间,以及计算内积的逻辑,这与第2A部分中的类似。
在第3B部分中,我们将使用与第3A部分相同的数据结构来表示BFP向量,但是我们将用lib_xcore_math的低级向量API函数调用来替换计算和管理头空间和指数的C代码的工作。我们还将用vect_s32_dot()替换计算内积的for循环,我们在第2C部分中遇到过。
这也意味着我们将使用VPU来完成大部分工作,而不是标量单元。
来自lib_xcore_math
本页面引用了lib_xcore_math中的以下操作:
实现
在第3B部分中,calc_headroom()只是vect_s32_headroom()的一个包装函数。这不仅更简单,而且速度更快得多。vect_s32_headroom()仍然需要遍历整个vec[]数组来确定头空间,但与我们的C实现不同,vect_s32_headroom()使用VPU的专用头空间硬件每3个指令处理8个元素。
快速检查第3A部分的calc_headroom()反汇编结果表明,它处理1个元素大约需要10个指令。
在第3B部分中,filter_frame()与第3A部分有所不同。第3B部分使用lib_xcore_math中的vect_s32_dot_prepare()来帮助确定输出指数和位移值。我们在第3部分中见过vect_s32_dot_prepare()。
简单来说,vect_s32_dot_prepare()接受两个输入向量的指数和头空间,以及向量的长度,然后使用这些值确定输出指数和需要传递给vect_s32_dot()的两个right_shift_t值。
这里有一个复杂性。vect_s32_dot()(以及filter_sample())返回int64_t值。(这是lib_xcore_math中返回标量的32位向量函数的典型做法,比如vect_s32_dot()、vect_s32_energy()和vect_s32_sum())。因为32位模式下的VPU累加器是40位的,我们知道为了安全起见,我们需要将结果额外向右移动8位。
因此,我们将vect_s32_dot_prepare()给出的指数加上8,并将filter_sample()的结果向右移动8位。
我们可以在filter_sample()的输出上向右移动8位,而不是在b_shr和c_shr输出之间总共添加8位,但是因为这些位移是在乘法之前应用的,所以添加到它们可能会导致不必要的精度损失。
// 应用滤波器以生成单个输出样本。
int64_t filter_sample(
const int32_t sample_history[TAP_COUNT],
const right_shift_t b_shr,
const right_shift_t c_shr)
{
// 使用给定的位移参数计算内积的尾数。
return vect_s32_dot(&sample_history[0],
&filter_bfp.data[0], TAP_COUNT,
b_shr, c_shr);
}
filter_sample()接受样本历史和由vect_s32_dot_prepare()生成的位移参数,并调用vect_s32_dot(),类似于第2C部分中的方式,只是现在返回64位结果。
// 接受新音频数据的帧并将其合并到样本历史中
static inline
void rx_and_merge_frame(
int32_t sample_history[HISTORY_SIZE],
exponent_t* sample_history_exp,
headroom_t* sample_history_hr,
const chanend_t c_audio)
{
// 用于放置新帧的BFP向量。
struct {
int32_t data[FRAME_SIZE]; // 样本数据
exponent_t exp; // 指数
headroom_t hr; // 头空间
} frame_in = {{0},0,0};
// 接受新的输入帧
rx_frame(frame_in.data,
&frame_in.exp,
&frame_in.hr,
c_audio);
// 如果需要,重新调整BFP向量的尺度,以便它们可以合并
const exponent_t min_frame_in_exp = frame_in.exp - frame_in.hr;
const exponent_t min_history_exp = *sample_history_exp - *sample_history_hr;
const exponent_t new_exp = MAX(min_frame_in_exp, min_history_exp);
const right_shift_t hist_shr = new_exp - *sample_history_exp;
const right_shift_t frame_in_shr = new_exp - frame_in.exp;
if(hist_shr) {
vect_s32_shr(&sample_history[0],
&sample_history[0],
HISTORY_SIZE,
hist_shr);
*sample_history_exp = new_exp;
}
if(frame_in_shr){
vect_s32_shr(&frame_in.data[0],
&frame_in.data[0],
FRAME_SIZE,
frame_in_shr);
}
// 现在我们可以合并新帧(逆序)
for(int k = 0; k < FRAME_SIZE; k++)
sample_history[FRAME_SIZE-k-1] = frame_in.data[k];
// 确保头空间正确
*sample_history_hr = calc_headroom(sample_history, HISTORY_SIZE);
}
rx_and_merge_frame()在第3A部分和第3B部分之间的唯一区别是样本如何进行位移。第3B部分不再逐个样本循环,而是调用vect_s32_shr(),该函数使用VPU来应用有符号、算术、饱和的右移操作。
结果
时间
| 时间类型 | 测量时间 |
|---|---|
| 每个滤波器系数 | 15.14 ns |
| 每个输出样本 | 15498.91 ns |
| 每帧 | 4054082.75 ns |
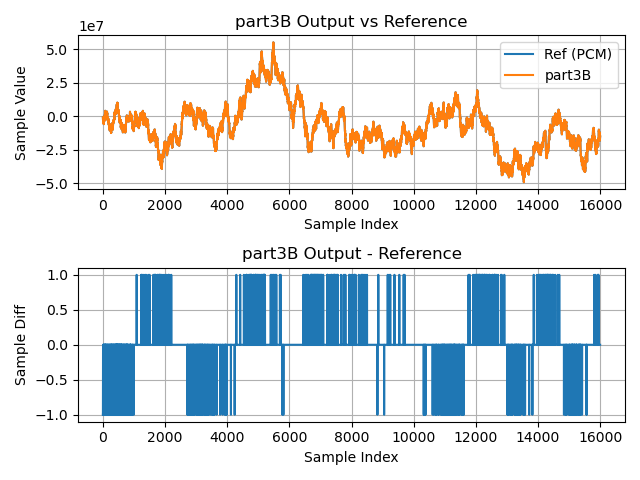
输出波形